
Medición de corrientes con dinamismo extremo usando tecnología de auto-rango
Rango de medición de 50 nA a 50 A
En el desarrollo y prueba de dispositivos y componentes con corriente continua o alimentación de la batería, el examen y la supervisión de las corrientes de funcionamiento es un tema muy importante. Cualquiera que mida las corrientes determinadas por una gestión compleja de potencia, los modos de suspensión, diferentes modos de funcionamiento y sus transiciones se enfrenta a la dinámica extrema que lleva a la tecnología de medición convencional hasta sus límites. Rango automático ofrece nuevas posibilidades, pero también nuevos desafíos
Auto-rango dinámico durante la medición
La tecnología ADC de alta resolución que se utiliza de forma generalizada en la tecnología de medición ya permite rangos dinámicos considerable para ser cubierta con un diseño fijo a escala. A pesar de ello, el sensor, la señal y los procesos físicos que se van a examinar a menudo se expanden mas allá de la gama seleccionada (por ejemplo a través de pre-amplificación) lo que es necesario con el fin de obtener el máximo aprovechamiento de la tecnología.
Mientras que el rango está fijado antes de la prueba en los métodos clásicos, métodos de rango automático permiten una adaptación dinámica durante la medición en curso. Esto es útil si no se conoce el curso esperado o si la prueba cubre el rango dinámico entero y debe ser grabado.
Si se quiere alcanzar la dinámica del rango extendida mucho más allá de la resolución del ADC (24 bits, por ejemplo), se puede aumentar dinámicamente la ganancia, al menos en el caso de las mediciones de voltaje. Para la detección de corriente con una resistencia en derivación, la tarea es más exigente: es necesario adaptar la derivación durante la medición - sin interrumpir el circuito de medida o que afecten negativamente a la medición continua en el área de transición.
Un escenario de aplicación típico es, por ejemplo, una única medición de prueba continua que analiza un ciclo de conexión completo: A partir de la corriente de fuga pequeña en el modo de reposo, a través de la oleada y de irrupción en la salida, a las áreas de trabajo de alta potencia - y viceversa. Además, la tecnología de medición debe ser no reactivo. Por lo tanto, no puede afectar al objeto de prueba y debe proporcionar una resolución óptima de datos y la precisión en todas las áreas de trabajo. Hay por supuesto una gran necesidad de esto en el sector de la automoción, por ejemplo, en un campo de prueba se examina una gran variedad de componentes y dispositivos de control de un vehículo y su compleja interacción en el sistema eléctrico a bordo. Más aún, el desarrollo y las pruebas de los dispositivos móviles con la batería y la tecnología inalámbrica e incluso la recolección de energía que se utiliza para tareas similares.
¿Qué mediciones se pueden alcanzar con auto-rango?
¿Dónde?
- Dinámica de rango extremo (Potencia total vs. suspensión)
- Prueba de encendido de componentes y sistemas
- Áreas de trabajo demarcadas/puntos de operación
- Uso limitado para señales periódicas
¿Cómo?
- Ajuste de rango dinámico durante la medición
- Adquisición continua de datos
- No hay interrupción en el circuito de carga (no reactivo)
Medición de corriente: un desafío especial
Cuando se miden corrientes, la elección de la resistencia de derivación de detección representa una decisión crucial y también una limitación. Si bien debe ser lo suficientemente grande como para suministrar señales de tensión significativas que no se ahoguen por el ruido y las variables de perturbación, la disipación de potencia que aumenta por el cuadrado de la corriente de operación impone límites duros. Para una corriente de trabajo máxima deseada (rango de medición) de 50 A, la derivada seleccionada no puede ser mayor que 2 mΩ, ya que entonces ya está disipando 5 W - el límite para un dispositivo si todavía está a mano. En este punto de funcionamiento superior suministra una escasa 100 mV que, sin embargo, sigue siendo bien manejable y puede procesarse de forma limpia después de una preamplificación adecuada, por ejemplo mediante un ADC de 1 V con una resolución de 24 bits. Sin embargo, si se desea al mismo tiempo una resolución de medición de 50 nA con esta configuración para, por ejemplo, para evaluar las corrientes de fuga, pronto se hace evidente que los límites de la física se superan ampliamente aquí. Las señales de 2 mΩ × 50 nA = 0,1 nV definitivamente no tienen ninguna posibilidad de prevalecer sobre el ruido y las termovoltajes parasitarias, etc., incluso si hubieran de ser "infladas" con una ganancia adicional de, por ejemplo, un factor de 1000, dando 0,1 μV (Figura 1a). Por lo tanto, la ganancia debe generarse a partir de la propia derivación.
Esto puede realizarse mediante una segunda derivación en serie, como se muestra en la fig. 1 b: La resistencia de esta derivación de 2 Ω se incrementa en un factor de 1000 (ganancia de derivación), pero sólo se activa a corrientes bajas. Se elimina dinámicamente tan pronto como las corrientes de trabajo más altas amenazan con sobrecargarlo
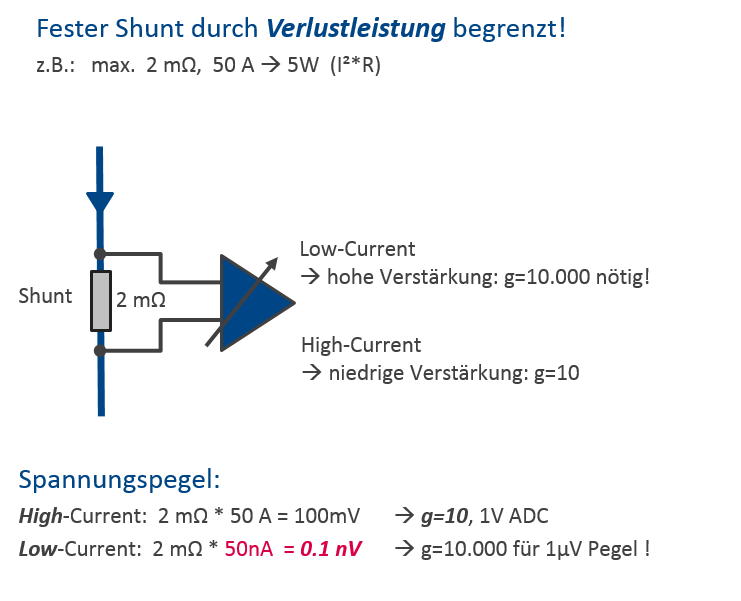
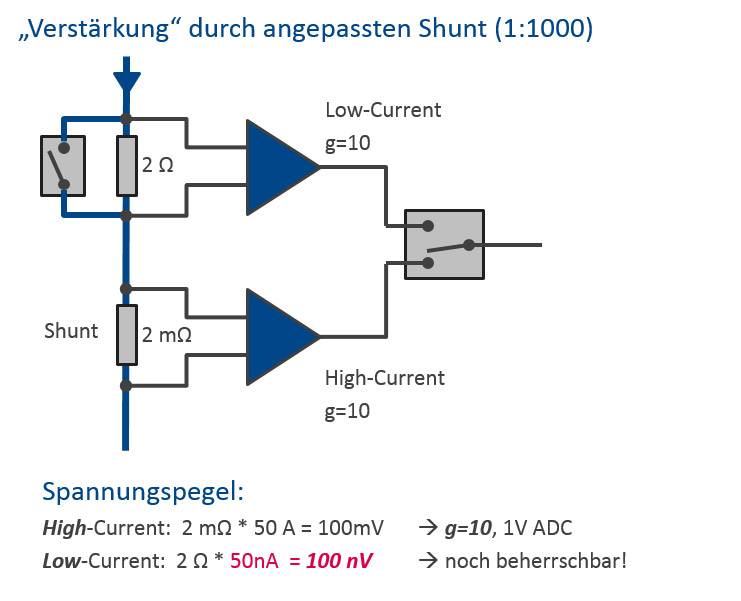
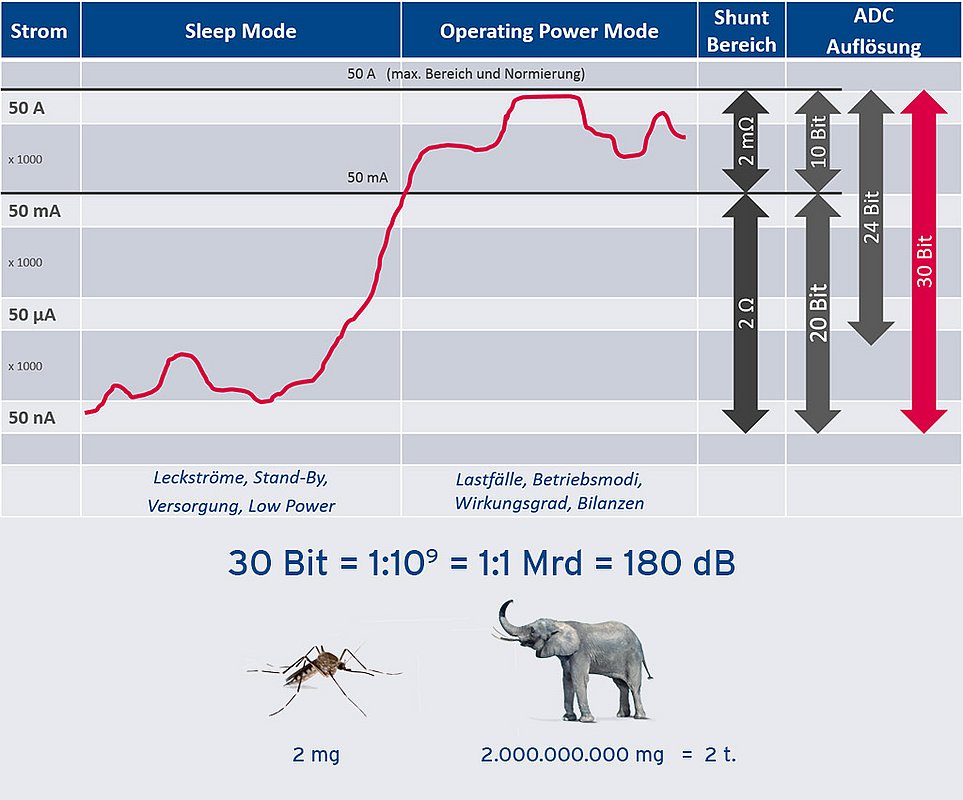
Figura 1c describe cómo, con esta combinación, se puede lograr una gama total de alrededor de 30 bits de la dinámica, es decir, una proporción de rango de medición máximo de resolución mínima de 1: 1 mil millones (10 ^ 9). A modo de comparación: usando un equilibrio con la dinámica de rango correspondiente, se puede medir un mosquito con un peso de 2 mg y un elefante con un peso de 2 toneladas (= 2 × 10^9 mg).
Así, el principio básico ya se indica
El corazón del módulo de medición del IMC está formado por la trayectoria de la corriente de medición, en el que una baja impedancia de 2 mΩ, derivación diseñada para que la corriente máxima este siempre activa. Una segunda, de alta impedancia de 2 Ω, derivación en serie que puede cerrar limpiamente incluso capturar las corrientes más pequeñas, pero se omite de forma dinámica por medio de interruptores casi tan pronto como el trabajo actual superan un umbral de alrededor de 100 mA. Los voltajes a través de dos derivaciones se miden por una / s ADC 30 ks con una resolución de 24 bits y seleccionado correctamente, escalado y calibrado por un procesador. Los datos de salida se entrega a través del bus CAN con velocidades de datos seleccionables de entre 1 Hz y 1 kHz. Magnitud de salida, además de valores medios, que son los valores mínimo y máximo dentro del intervalo de salida seleccionado. Estos se derivan a partir de la velocidad de datos interna de 30 kHz.
Conmutación dinámica:
La conmutación de la derivación debe llevarse a cabo mucho más rápido de lo necesario para la medición real: El aumento espontáneo de corriente debe instantáneamente provocar un cortocircuito en la derivación de alta impedancia con el fin no sólo de evitar que se queme, sino también para evitar una carga de voltaje pico en el circuito de carga. En cuanto a (aunque transitorio) caída de tensión en el circuito de carga, influirá o incluso desconectará los componentes de la carga a la prueba.
Así, la activación de la derivación by-pass es controlada por un rápido comparador, pero una activación renovada de la derivación de alta impedancia sólo está permitida con un retraso (fig. 2). La combinación del nivel de histéresis (umbral de conmutación) con la histéresis temporal de la activación rápida (<1 s) y la desactivación más lenta (<1 ms) de la derivación garantiza transiciones seguras y estables
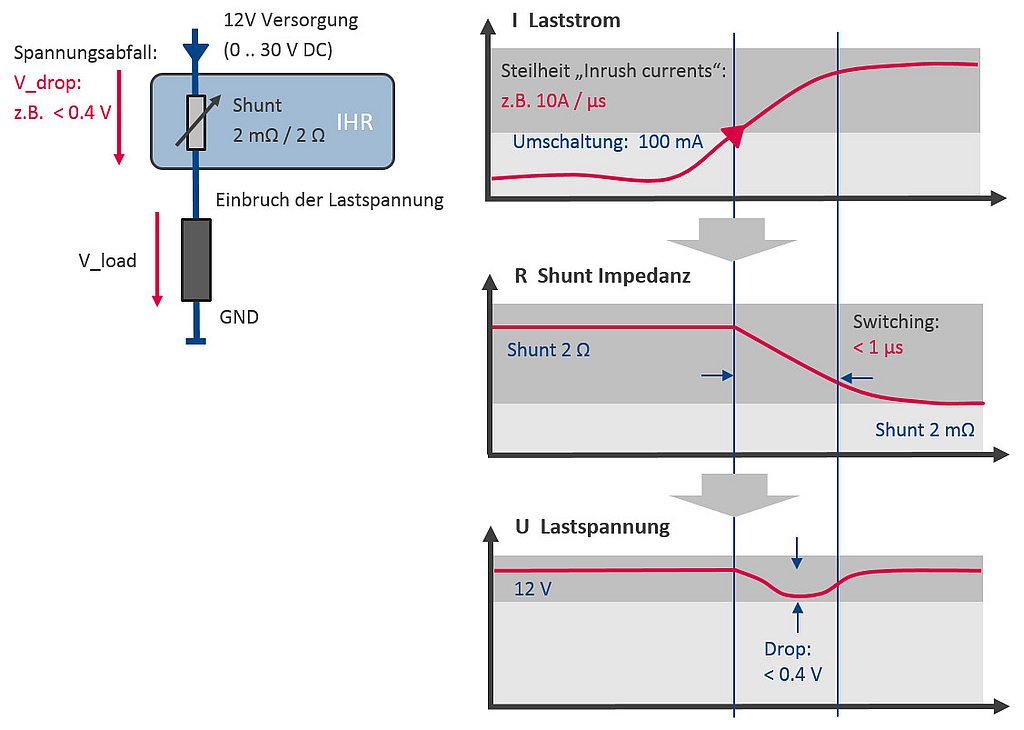

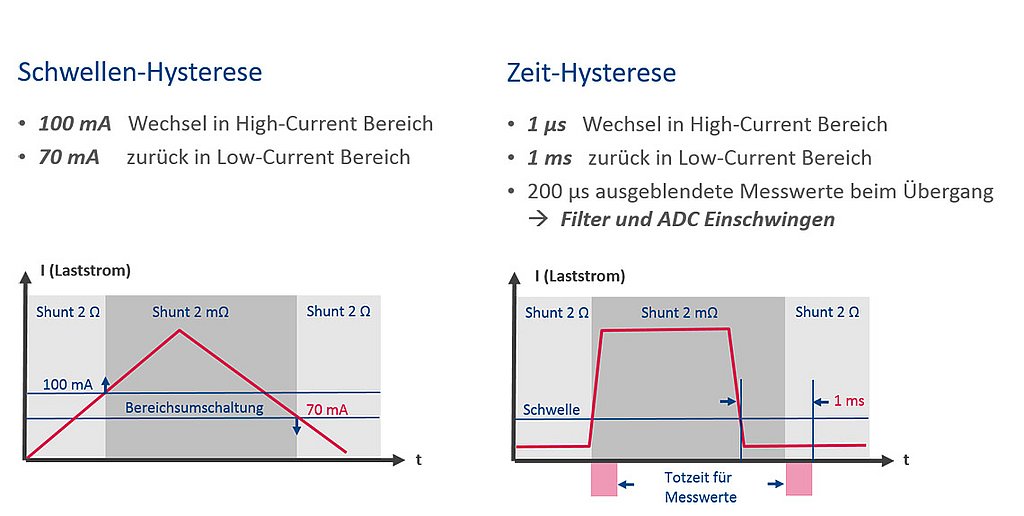
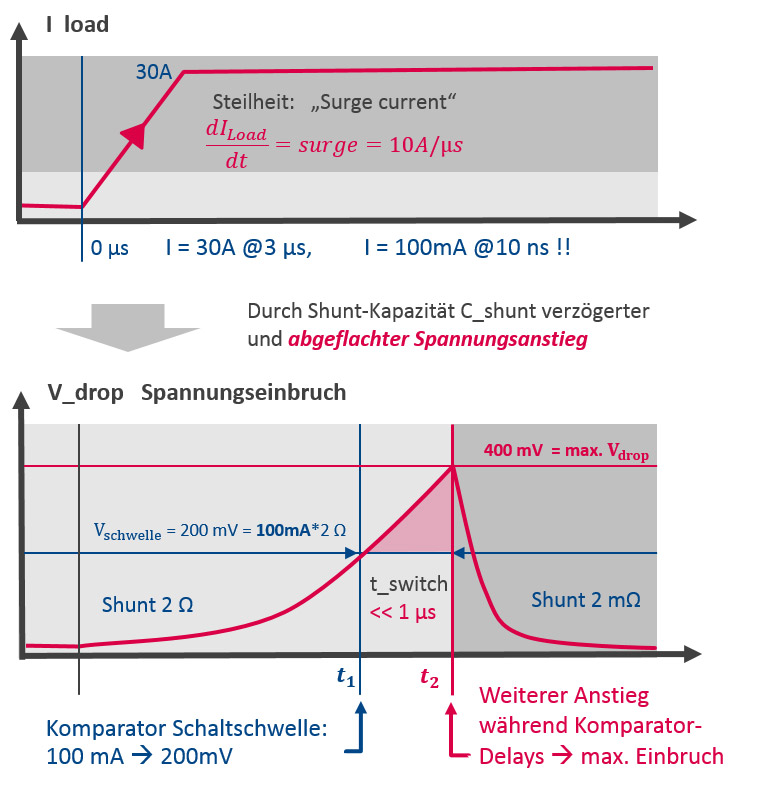
Por lo tanto, también es posible en el caso de aumentos de corriente de 10 A /µs realizar una conmutación virtualmente no reactiva que limita las caídas de voltaje a través de la carga a aproximadamente 400 mV. Una capacitancia apropiada a través de la derivación también ayuda a aplanar los transitorios de voltaje en la zona de transición hasta que el comparador reaccione (fig. 3). Por lo tanto, el concepto también es adecuado para medir objetos de prueba con un comportamiento altamente dinámico, tales como reguladores de conmutación, controladores LED, etc
Los tiempos muertos de histéresis, así como los tiempos de sedimentación de los trayectos de medición paralelos (ADC) que tienen que ser enmascarados, limitan las velocidades de salida de datos de medición significativas a 100 Hz. Sin embargo, también es posible desactivar la conmutación de shunt de rango automático en un "modo fijo", y luego usar una velocidad de datos máxima de 1 kHz.
Un fusible electrónico basado en MOSFET rápido y reversible garantiza la seguridad en todos los casos y desconecta la trayectoria de corriente en caso de sobrecarga
Módulo CAN de uso universal:

Este concepto de auto-rango se implementa como un módulo de medición de bus CAN universalmente utilizable para su uso en laboratorios y bancos de pruebas. En forma de imc CANSAS-IHR (fig. 4), en una carcasa robusta de perfil de aluminio, combina dos trayectorias independientes y aisladas eléctricamente para la medición de cargas de corriente con hasta 18 V (DC). El aislamiento permite que el punto de medición se coloque en cualquier lugar: conductor de alimentación o retorno (lado alto / lado bajo), corrientes parciales o totales.
Además del procesamiento y control de la señal digital, el diseño térmico meticuloso del sistema es de particular importancia. Las enormes corrientes se deben encauzar cuidadosamente en la disposición de PCB a través de los componentes tales como la tecnología de conexión, la derivación de potencia y el interruptor FET que tienen que ser enfriados adecuadamente. El shunt de precisión es uno de los componentes más críticos en este caso: un flujo de calor simétrico debe asegurar que los termopares parásitos no causen errores y derivaciones mayores en las uniones y deben minimizar los efectos del auto-calentamiento.
imc CANSAS-IHR módulo de medición de corriente de alta resolución
- Medición de corriente aislada con shunts
- Objetos de prueba: cargas de hasta 18V DC
- 2 shunts con conmutación dinámica de la trayectoria de corriente (derivación) a alto flujo de corriente
- Selección de gama automática y dinámica: auto-range
- Dinámica de rango de 30 bits resultante: 50 nA - 50A
- Adquisición y producción de media y min / max
- Salida seleccionable a intervalos de 1 Hz/10 Hz/100 Hz, procesamiento interno/adquisición con 30 kHz
- Velocidad de datos con un rango de medición estático (50A, sin auto-rango) hasta 1 kHz
¿Cuándo es útil el auto-rango?
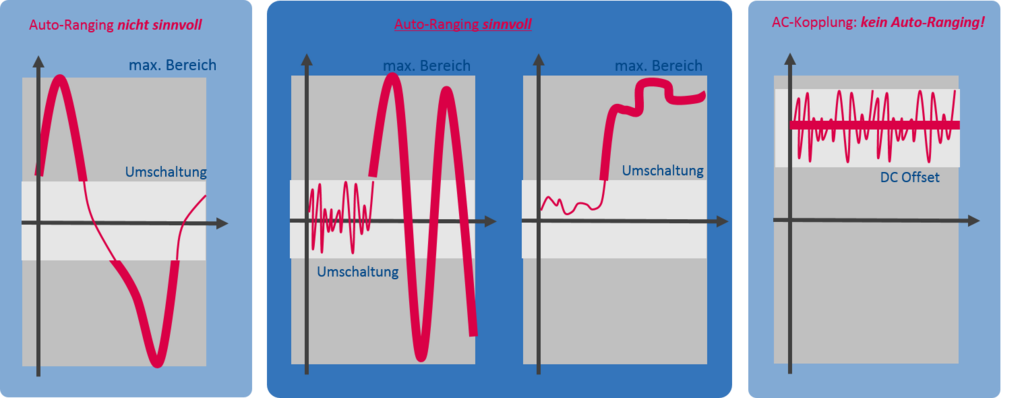
Básicamente, los métodos de auto-rango son útiles en particular en las aplicaciones descritas aquí, que se refieren a áreas de trabajo separadas que se atraviesan sucesivamente y en las que también se mantiene (figura 5). Entonces se puede utilizar realmente el hecho de que las señales pequeñas se procesan óptimamente con poco ruido y ganancia adaptada, resultando en una ganancia real en la resolución de medición utilizable.
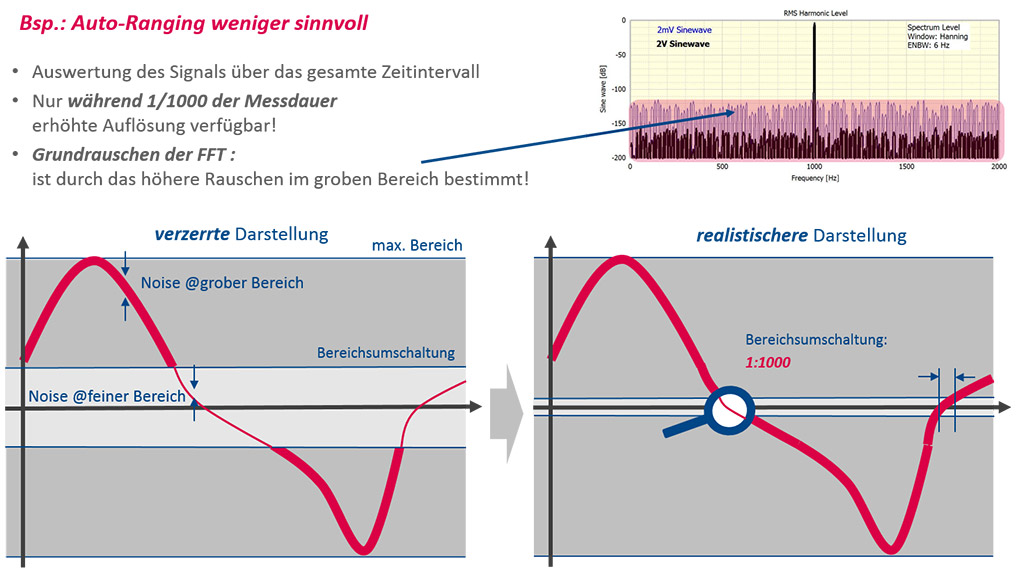
Sin embargo, el auto-rango no es una cura, todo lo que necesariamente será de ventaja en cualquier situación de medición. En el caso de señales periódicas, por ejemplo, que se analizan espectralmente mediante FFT, debe tenerse en cuenta lo siguiente: Si la parte interior del rango de señal, es decir, el rango de medición fino de pequeñas amplitudes, se resuelve idealmente con adaptación (Por ejemplo, g = 1000), entonces este nivel de ruido bajo también es efectivo sólo en una porción comparativamente pequeña del tiempo total, es decir 1/1000 (figura 6). Por lo tanto, la influencia sobre el ruido de fondo (piso de ruido) de la FFT, que todavía está dominada por la relación señal / ruido (SNR) del rango de medición aproximado, es despreciable.
Un requisito esencial adicional para el auto-rango es que el rango fino o ampliado debe ser cero-simétrico. La señal extendida que se va a resolver debe por lo tanto estar alrededor del punto cero del rango de señal unipolar o bipolar, porque no nos interesa aquí acoplamiento de CA, sino con una pre-ganancia lineal adaptada. Si bien este es el caso de este tipo de medida de corriente, no se aplica en aplicaciones muy diferentes, tales como mediciones de puente usando extensómetros, porque en ese caso la señal es típicamente afectada por un gran offset inicial que necesita ser compensado.

Contact us
EUROAMERICA IN MOTION
Querétaro/México
Phone: +52 442 688 1349
E-Mail: info@euroamerica-im.com
Headquarter | info@imc-tm.de
USA | accounts@imcdataworks.com
China | cnsales@imc-tm.com
UK | uk-sales@axiometrixsolutions.com
Spain | info@imc-tm.es
South Korea |hotline@imc-korea.kr
Switzerland | info@imc-tm.ch
© imc Test & Measurement GmbH. All rights reserved. Datenschutz. Meldung nach Hinweisgeberschutzgesetz. Impressum.